プロポ改造でUSBジョイスティック
かつてJOYPRO2として、ラジコンの送信機をジョイスティックとして使うための変換器を制作していました。2002年頃です。その頃はX347送信機を主に使っていました。Windows98にCFS、CFS2を入れていました。写真の背景のディスプレイで大体年代は想像つくと思います。
最近思い立ってCFS(Microsoft Combat Flight Simulator)をWindows10へ入れてみました。ところがJOYPROは処分してありません。1個位は残していたはずなんですが、行方不明です。そこでJOYPROの再制作を始めました。
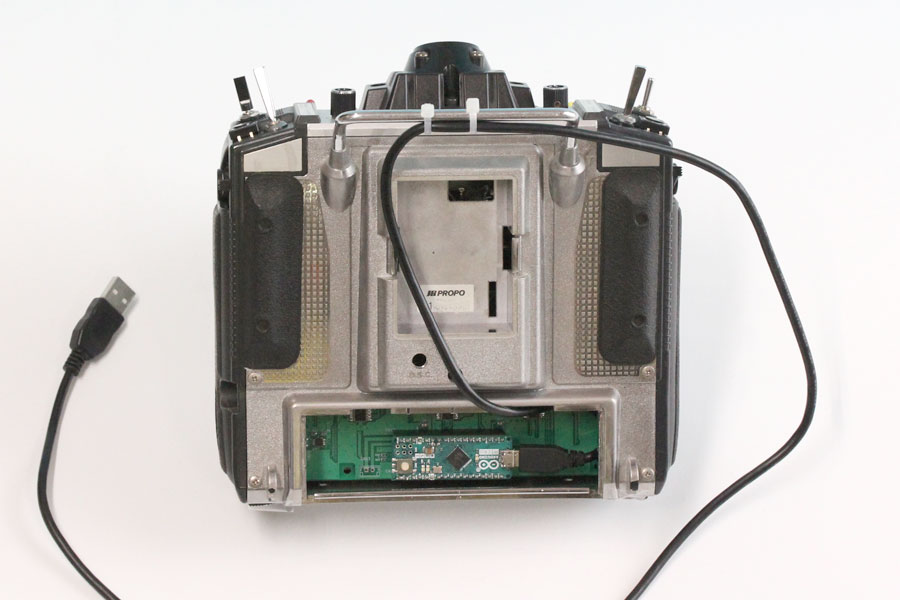
送信機-完成形

写真はJR(旧日本遠隔制御株式会社)のpcm10S送信機です。古いですが、私はこの時代にX347でラジコンヘリを始めており、その頃のTopのマシンで思い入れがあります。一部樹脂の壊れとかトリムの陥没とかありますが、修理して使用に問題ありません。しかしさすがに72MHzのRFでは今後フィールドで使うことは無いでしょうから、これをバサッと改造してジョイスティック専用機にしてしまいました。表面から見た目は変わっていないように見えます。見にくいですが両肩にタクトスイッチを取り付けて機銃発射と機関砲に振り分けています。奥の長いレバースイッチ以外はモーメンタリースイッチに交換しています。AC100V用なので経年変化が心配ではありますが、手持ち品を使用しました。ジョイスティックとしてはモーメンタリースイッチ(跳ね返り型)が良さそうです。ネジ径がオリジナルと異なっていて、飾りナットではなく普通の六角ナットになっているスイッチがあります。これがちょっと残念。
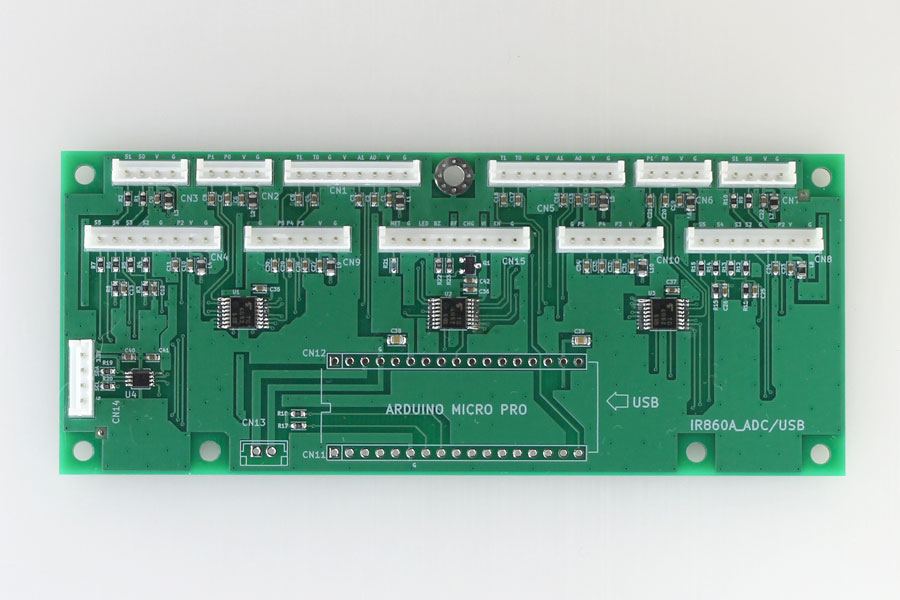
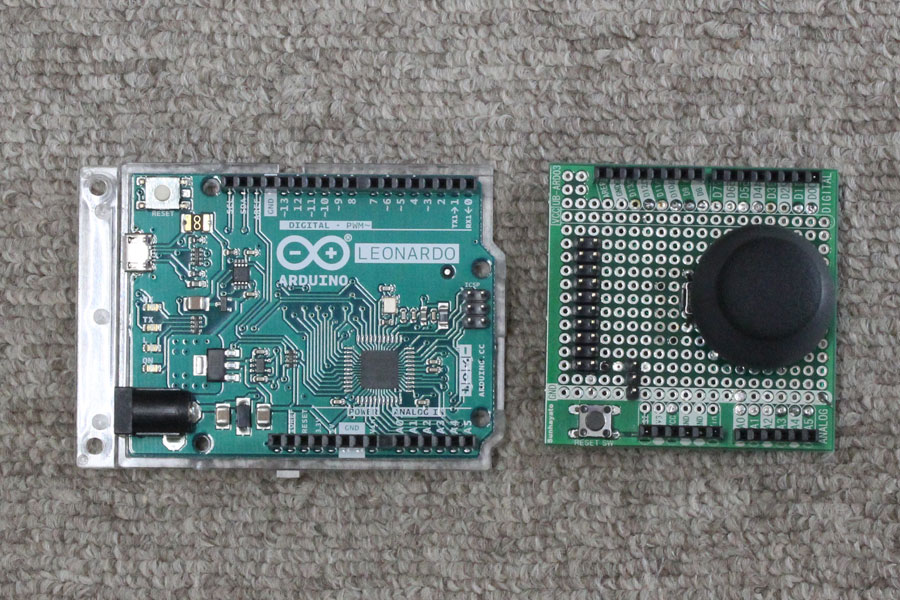
この基板は余分を作りましたので、写真の状態で頒布します。BASEショップに置いています。限定3枚です。Arduino Pro Microのシールドとして使えます。タカチのケースにポテンショメータ(ボリューム)やスイッチを並べて、独自のジョイスティックを制作してみて下さい。pcm10S等市販品を改造される時は、もちろん自己責任です。
回路図
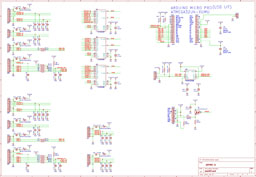
回路図の説明を続けます。
CN1,CN2,CN3,CN4,CN9は送信機向かって右側の入力要素用です。CN5,CN6,CN7,CN8,CN10が左側です。エルロンのポテンショメータはCN1:3pin=STICK0_Rに接続しています。同様にスロットルはSTICK1_Rです。それぞれのトリムはTRIM0_R,TRIM1_Rとしています。左側のCN5:3pin=STICK0_Lはラダーです。STICK1_Lはエレベータです。
CN1.3 STICK0_R エルロン
CN1.4 STICK1_R スロットル
CN1.7 TRIM0_R エルロントリム
CN1.8 TRIM1_R スロットルトリム
CN2.3 POTM0_R HOV.T(正面右上のポテンショメータ)
CN2.4 POTM1_R AUX4(上面右のポテンショメータ)
CN3.3 SW0_R AUX2(正面右上のトグルスイッチ)
CN3.4 SW1_R AILE_D/R(正面右上のトグルスイッチ)
CN4.3 POTM2_R ハイピッチ(右側面のレバー式ポテンショメータ)
CN4.5 SW2_R FLIGHT_MODE(右肩の両切りスイッチ前側)
CN4.6 SW3_R FLIGHT_MODE(右肩の両切りスイッチ向う側)
CN4.7 SW4_R GEAR/INVERT(右肩のレバースイッチ)
CN4.8 SW5_R 追加SW(右肩の機銃用に改造追加したpushSW)
CN5.3 STICK0_L ラダー
CN5.4 STICK1_L エレベータ
CN5.7 TRIM0_L ラダートリム
CN5.8 TRIM1_L エレベータトリム
CN6.3 POTM0_L HOV.P(正面左上のポテンショメータ)
CN6.4 POTM1_L AUX5(上面左のポテンショメータ)
CN7.3 SW0_L MIX(正面左上のトグルスイッチ)
CN7.4 SW1_L ELEV_D/R(正面左上のトグルスイッチ)
CN8.3 POTM2_L ローピッチ(左側面のレバー式ポテンショメータ)
CN8.5 SW2_L THRO.HOLD(左肩の両切りスイッチ前側)
CN8.6 SW3_L THRO.HOLD(左肩の両切りスイッチ向う側)
CN8.7 SW4_L RUDD_D/R(左肩のレバースイッチ)
CN8.8 SW5_L 追加SW(左肩の機関砲用に改造追加したpushSW)
SW4はプルアップをして、アナログとして読み取ります。
アナログ入力はU1,U2,U3のアナログマルチプレクサ(TC4052)を使用して4:1入力としてアナログポートに入れています。
CN9,CN10はおまけ(予備)の入力で、外部のポテンショメータ(可変抵抗器)を読み取ります。
これも予備ですが、レベルシフター(TXS0102)で3.3V系のI2CをCN14に出力しています。
pcm10Sには圧電ブザーとLED、レベルメータが取り付けられています。このコネクタが残っていたので、一応これの対応コネクタをCN15に設けています。レベルメータは固定抵抗で電源電圧を見ていますが、何も計算せずに単に振らしているだけです。圧電ブザーはエミッタフォロワで駆動し、Arduinoのtone関数が使えるようにしています。
機能割当て
機銃および機関砲は、基板用のプッシュスイッチ(タクトスイッチ)を追加して取り付けています。つまり改造して穴を開けています。ここまでするのは私だけと思います。一般的にはGEAR/INVERTEDスイッチを機銃に割当てることになると思います。ただし、この記事では特殊な私の例で説明を続けていきたいと思います。スケッチの基本要素は簡単なのですが、複雑なことをして長いソースリストになっていますので、それを解析する参考にして下さい。
ゲームの動作にボタンを割当てる前に、Windowsのプロパティで、Joystickの動作を確認しておいた方が良いと思います。Windows10では"スタート"を左クリック\"設定"を左クリック\"デバイス"を左クリック\"関連設定のデバイスとプリンター"を左クリックすると、"Arduino Leonardo"のジョイパッドのアイコンが見えます。これを右クリック\"ゲームコントローラの設定"を左クリック\"ゲームコントローラ"窓の"プロパティ"を左クリックするとプロパティ窓が現れます。
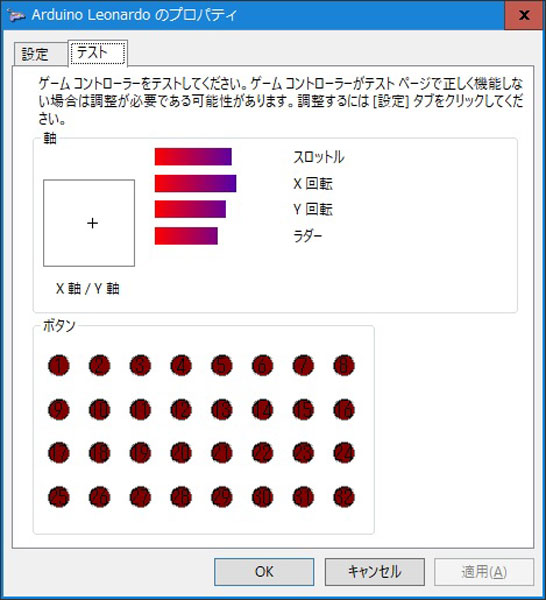
これは現在のプログラム設定による画面です(スケッチの冒頭のJoystick( )によるメンバー宣言)。エルロンはX軸、エレベータはY軸、スロットルはスロットル、ラダーはラダーの各項目に対応します。右サイドのトリムはX回転、左サイドのトリムはY回転に対応します。pcm10Sには他にもHOV.pitchなど4入力アナログがありますが、プログラムで設定しても軸は増えませんでした。むしろAruuino Leonardoのゲームコントローラが認識されなくなりました。Joystick宣言でむやみに"true"設定してもゲームコントローラが対応していないようです。もっとも各ゲームで割り当てるアナログ入力はそれほど無くて、ボタン設定によるプッシュ入力が多いようでした。cfsにはこれで十分です(X回転,Y回転は割当てていません)。
ラジコン送信機はスティックの各軸に1:1でトリムがあります。送信機と同じイメージで、トリムはセンターを中心としてスティック軸に加減算しています。よってトリムはゲームプロパティに現れていません。またスティックがセンターにあっても機械誤差により読取り値がセンターにあるとは限りません。これはデバッグ時にUARTを接続して値を直読し、プログラム埋め込みで補正しました。本来の送信機は液晶画面を見ながら機体調整しつつ補正するのですが、この改造では実現できていません。またエクスポネンシャルなどのカーブ設定も同様に実現できていません。今後の課題と思います。
注:Arduinoでは、プログラムのことをスケッチと言っていますね。私はソフトとも言っています。今後なるべくスケッチと記述しますが、癖でプログラムと書くかも知れません。
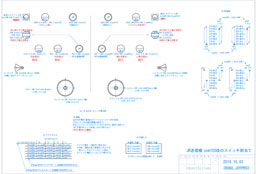
プロポ入力のゲームに於ける機能割当ては、ゲーム(シミュレート)をしている間に何度も再スケッチを繰り返して、当初より変化して来ました。冒頭の割当て図は最新のものに更新しています。
私はトグルスイッチを跳ね返り型(モーメンタリタイプ)に交換して、HATスイッチの代用としています。例えば右肩のFLIGHT_MODEスイッチを手前に倒すと首を右回しで、後ろを見るような動作です。スイッチを押し続けている間は後ろを見続けます。スイッチを離すとまたグルリと右側を見渡して正面を見ます。8方向のスイッチであれば簡単ですが、これを単独のスイッチで同一方向の半回転としてソフト的に実現しています。例えばこのような動作です。
----------- ON ----------|-------- OFF -------------------|
右前 -> 右 -> 右後ろ -> 後ろ -> 右後ろ -> 右 -> 右前 -> 前方
HATをこの方法で実現すると、ひとつのスイッチがいくつものボタンに割り当てることになります。便利な半面、ゲームの設定画面においてボタンを機能に割り当てることが困難になります。そのためHOV.P或いはHOV.Tのポテンショメータを左にいっぱい回しきった時には、(e)HAT機能の上のテーブルのように、トグル毎に各ボタンがローテーションするようにしました。[次にスイッチをONした時はボタン番号はX番]と言うのを頭に入れておいて、機能割当てをクリックして下さい。プレイする時はHOV.P/HOV.Tポテンショメータをある程度(9時の位置程度)右に回して下さい。回す大きさにより右回り(HOV.T)、左回り(HOV.P)の速度が変わります。
設定中にローテーション位置がどこか解らなくなった時には、このポテンショメータを少し回しておくと、前方視界に戻ります。また、ボタン割当ては右回りでも左回りでも、どちらでも同じなので片方だけで設定できます。
もちろん、ローテーション機能で飛行しても構いません。ただ対戦中は忙しくて何回もカチカチしている暇はありませんでした。
割当て図において、B1、B2とかはプロパティ窓のボタン番号を示しています。(B3),(B4)はその番号を直接出力せずに、HATスイッチのスイッチ割当ての増減に使っています。ただし、現在のスケッチではB1、B2も(B1),(B2)としてHAT機能を割当てており、直接ボタン指定はできなくなりました。
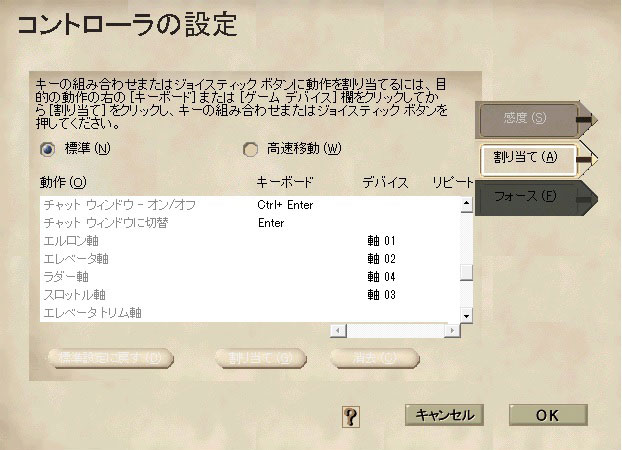
ゲームのスイッチの割当ては、写真のような"コントローラの設定"画面から行います。cfs(cfs1)の例です。cfsのコントローラの設定画面で割当てをし、フリーフライトをして確認をしたり、シミュレータでできなければ、プログラムを修正したりしました。コンバットフライトシミュレーターでは、HATスイッチが活躍するようです。何回もスイッチの割当てを変更しています。何回もHATスイッチ(小さ目のアナログジョイスティック)を外付けしようか、ケースから作り直そうかと思いました。しかし主に見たいのは、旋回で上方に消えた敵機か、後ろの敵機のようです。それらの一応の結果が割り当て図の赤文字になっています。
元々ストレス解消でcfsを再び始めたのですが、かつ1週間程度で終わる予定が1ヶ月過ぎて余計ストレスが貯まったようです。今後はfsxで気楽にストレス発散もいいかな。新バージョンのニュースも流れていて来年が楽しみです。
スケッチ
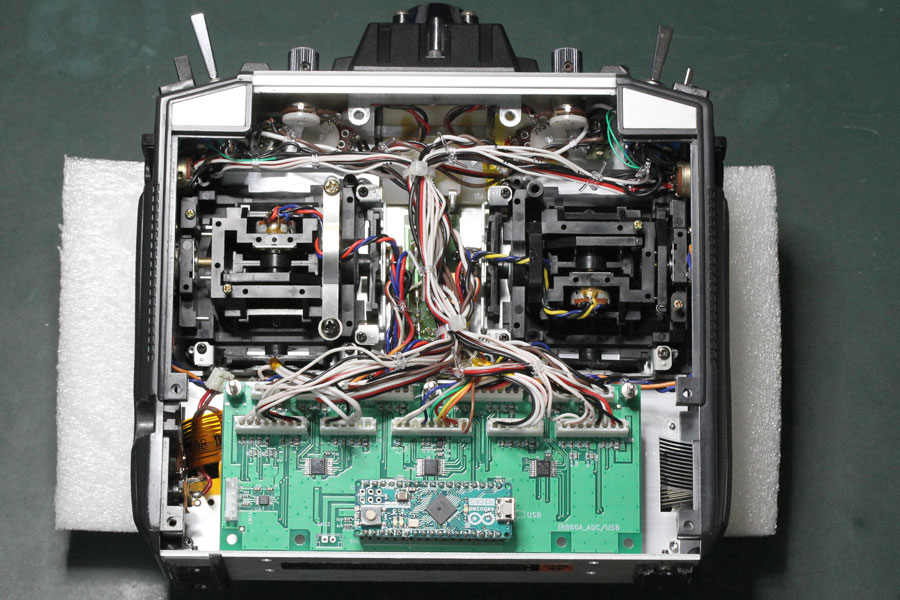
このプロジェクトのキモは、ATmega324U4を使えば、ArduinoのIDEで簡単にUSB ジョイスティックが作れるという事です。当初は手探りだったので、Aruduino LEONARDOで試作しました。その後基板化してPro Microを使用したのですが、ちょっと高いですね。コンパチ品がAmazonで安く出回っているようです。Pro Microに差し替えできないかと考えて見ましたが、ピンコンパチではなくて、ジャンパー処理が必要になります。それであれば、シールドを止めて素直にATmega324U4の基板を作ればいいので、次バージョンではそうすると思います。
私は外部エディタでスケッチを書いています。Cのプログラムと同じ環境でコーディングできます。ただし、Arduinoのエディタのタブに合わせてタブ数は2文字にしています。ArduinoのIDEで開く分には問題ありませんが、IDEのエディタはタブコード2文字のスペースに置き換えてしまいます。IDEエディタで保存するとタブコードがスペースに置き換わったまま保存されます。外部エディタを使用する方は気をつけて下さい。
スケッチのスタートはいくつかのホームページを参照しました。特にArduino LeonarudoのHID ジョイスティックの項は記述法も含めて参考になりました。
以降、ソースリストを抜粋で説明します。ジョイスティック制作の参考にしてみて下さい。なおいつものお約束ですが、この記事を参考に何らかの実験、制作、改造や何らかトラブルに見舞われても全て自己責任で対処してください。質問は問い合わせのページよりお願いします。
USB ジョイスティックの使用
まずコードの最初にJoystick宣言をします。これはcppのメンバー定義と言うのかも知れません。良くは解らないのですが、こう記述するとWindows10のプロパティ画面がこの記事のようになるようです。
Joystick_ Joystick(JOYSTICK_DEFAULT_REPORT_ID, JOYSTICK_TYPE_JOYSTICK, 32, 0,
true, true, false, true, true, false, true, true, false, false, false);
// XA YA Za Rx Ry Rz Rudd Throt Accel Brake Steering
次にsetup()でJoystickの使用を開始します。
void setup() {
Joystick.begin(); // 開始
Joystick.setXAxis(0x200); // 初期化が必要であれば
Joystick.setYAxis(0x200); // Analog入力は0x000~0x3FFまで
Joystick.setRxAxis(0x200);
Joystick.setRyAxis(0x200);
Joystick.setRudder(0x200);
Joystick.setThrottle(0x200);
}
loop()でAnalog値を読み取ったり、デジタル入力を読み取ってUSBに出力します。
void loop() {
analogvalue = analogRead(A0); // 何らかのanalog値を
Joystick.setXAxis(analogvalue); // X軸に設定
Joystick.setButton( 5, 1); // ボタン5をON
Joystick.setButton( 6, 0); // ボタン6をOFF
}
スケッチの説明
Arduino IDEのスケッチ(プログラム)をzip圧縮でここに置いておきます。解凍してできるのはjoypro3.inoと言うスケッチファイルのみです。私と同じハードウェアの人は少ないでしょうから改変は必須になると思います。以下にファイルの行番号に沿って説明していきます。
変数定義
冒頭はコメント行から始まります。コメントは主にスラッシュ2つのコメント記号を使用しています。10行目の
10 #include <Joystick.h>
12~13行目のJoystick()は前章で説明しました。
12 Joystick_ Joystick(JOYSTICK_DEFAULT_REPORT_ID, JOYSTICK_TYPE_JOYSTICK, 32, 0,
13 true, true, false, true, true, false, true, true, false, false, false);
17行目の
17 int HATmode = 0; // 0=cfs1,1=cfs2: トグルスイッチをHATに見立てた時の振舞い
19,20行はLEDの点滅に関する変数です。
22~43行はアナログ入力に関する変数です。アナログ入力はATmega32u4に6チャネルあります。それを4バンク切り替えとして24ポートに拡張しています。読み込みは一旦配列に格納し、前回の値と移動平均しています。
配列に保存したアナログ値は、トリム補正やスイッチに分解します。結果を45~69行の固有名の変数に格納します。
JOYstick出力はこの値を出力しますが、変化のあった時のみ出力するので、前回の値を71~72行の配列に保存します。
77~87行はデジタル入力に関する配列定義です。ハード寄りの機能をスイッチと言い、ソフト(Windowsのプロパティ等)寄りの機能をButton(ボタン)と記述しています。明確に定義して使用いるのでは無く、曖昧です。Button=Switch=SWと思って下さい。
89~116行はスイッチ入力を疑似HATスイッチとする為の変数です。
118~124行はスイッチのチャタリングを取る為の変数です。スイッチの変化から実際の検出まで2チック(インターバル)遅れがあります。プログラムは16mSのインターバルで動作するようにしています。当初のデバッグ中にオシロ(オシロスコープ)で周期を見ていてそれ位で妥当と決めた値です。かつてラジコン受信機のPWM波形を観測した時、その周期は20mSでした。今回スイッチ入力の検出に、2~3 周期の遅れが発生しますので、少し早めの16mSにしています。126行はそのチック(tick)に関する変数です。
void setup()
Arduino LEONARDOの回路図にあるATmega32u4のシンボルには,ポート0のシリアルが見当たりません。代わりにポート1を使うようです。Pro Microもコンパチ品も同様です。
131 Serial1.begin(38400);
D0入力ポートはRX1(先のSerial1の受信)と兼用ポートです。シリアルでは使用しませんので、入力ポートを宣言しています。
133 pinMode(0, INPUT_PULLUP);
134 pinMode(13, OUTPUT);
D13はLED出力ポートです。Pro Microの基板上で完結しているポートで、コネクタピンには接続されていません。動作確認用のLEDとして点滅させています。
77行~87行で配列に格納したD4~D9を、実際に入力ポートとして割当てます。
136 for (int index = 0; index < NUM_OF_BUTTONS; index++) {
137 pinMode(ButtonPin[index], INPUT_PULLUP);
138 }
D10,D11はTC4052(アナログマルチプレクサ)の入力切り替えです。
140 pinMode(10, OUTPUT); // TC4052 SELA
141 pinMode(11, OUTPUT); // TC4052 SELB
149~159行に於いて、potm0の値を読み出します。初期化の時にHATmodeの0/1を確定します。
149 digitalWrite(11, 0); // B SELB:SELA = 2'b01
150 digitalWrite(10, 1); // A
151 HATmode = ( analogRead(ADCpin[0]) < 0x100 )? 0: 1;
...省略
159 delay(300);
161行でJoystickの使用宣言をしています。162~167行でディフォルト値を各軸に設定しています。
161 Joystick.begin();
void loop()
178,179行で16mSの周期動作を行うように設定しています。Renesas RL78/G13ではインターバルタイマの割込みを使用していましたが、Arduinoでは、ユーザが割込みを使用しなくても済んでいます。
178 if (millis() >= NextTickTime) {
179 NextTickTime = millis() + 16; // 16mSのインターバルで以降の処理をする。
.....mainの色々な処理 省略
658 }
182~199行はsetup()の133行で説明した具体例です。D0入力がONであればこれ以降の処理はせずにloop()の最初に戻ります。
183 if (digitalRead(0) == 0) { // pushSWが押されていたら
184 digitalWrite(13, 0); // LED消灯
185 return; // USBに出力しない
186 } else {
LEDの処理
199 }
202~241行はアナログ入力を配列に入れています。移動平均も求めています。
215 digitalWrite(11, 0); // B SELB:SELA = 2'b00
216 digitalWrite(10, 0); // A
217 for (index = 0; index < NUM_OF_ADC; index++) {
218 oldAnalog00[index] = lastAnalog00[index];
219 lastAnalog00[index] = (analogRead(ADCpin[index]) + lastAnalog00[index]) >> 1;
220 }
245~319行は配列に読取ったスティックのアナログ値を、そのペアーのトリムにより増減しています。また、スティックの中央値に機械誤差があった為、補正を加えています。Serial1を使って観測しました。
253 temp = lastAnalog10[0] >> 3; // trim0R 1/8
254 if ( temp >= 64 ) {
255 stick0R = lastAnalog00[0] + (temp & 0x003F);
256 if ( stick0R > 1023) stick0R = 1023;
257 } else {
258 stick0R = lastAnalog00[0] - (temp ^ 0x003F);
259 if ( stick0R < 0 ) stick0R = 0;
260 }
261 stick0R -= 13; // マシン固有の補正
262 if ( stick0R < 0 ) stick0R = 0;
245~319行はアナログ値の配列内容を固有名の変数に代入しています。また、アナログとして読取ったスイッチ入力を0/1のデジタルに変換しています。スイッチがOFFの時は'0',ONなら'1'です。
323 potm0R = lastAnalog00[1];
324 potm1R = lastAnalog01[1];
325 potm2R = lastAnalog10[1];
392~416行はスイッチのチャタリングを取る作業です。特に、sw2R/sw3R,sw2L/sw3Lに於いて、接点のデバウンスよりも、抵抗値によるエッジ遷移に問題があった為に作成しました。392~406行でスイッチ入力をビット有意の16bitに並べ替えています。'1'がON方向になるように一部インバートしています。
408~416行において、過去の値とANDをしてチャタリングを取り、排他ORでエッジを求めています。SWedgeとSWlevelを後程使用します。
392 SWnow = 0x0000;
393 if ( !digitalRead(ButtonPin[0])) SWnow |= 0x0001; // sw0R 直接入力port
394 if ( !digitalRead(ButtonPin[1])) SWnow |= 0x0002; // sw1R 直接入力port
395 if ( sw2R ) SWnow |= 0x0004; // sw2R anlog入力より
396 if ( sw3R ) SWnow |= 0x0008; // sw3R anlog入力より
397 if ( sw4R ) SWnow |= 0x0010; // sw4R anlog入力より
398 if ( !digitalRead(ButtonPin[2])) SWnow |= 0x0020; // sw5R 直接入力port
399 if ( !digitalRead(ButtonPin[3])) SWnow |= 0x0040; // sw0L 直接入力port
400 if ( !digitalRead(ButtonPin[4])) SWnow |= 0x0080; // sw1L 直接入力port
401 if ( sw2L ) SWnow |= 0x0100; // sw2L anlog入力よ
402 if ( sw3L ) SWnow |= 0x0200; // sw3L anlog入力より
403 if ( sw4L ) SWnow |= 0x0400; // sw4L anlog入力より
404 if ( !digitalRead(ButtonPin[5])) SWnow |= 0x0800; // sw5L 直接入力port
405 if ( buz2R ) SWnow |= 0x1000; // potm2R中間値
406 if ( buz2L ) SWnow |= 0x2000; // potm2L中間値
407
408 SWnew = SWnow & SWold1 & SWold0; // 今回のレベル
409 SWold0 = SWold1; // 入力を記憶(shift)
410 SWold1 = SWnow; // 入力を記憶(shift)
411
412 SWedge = SWkeep ^ SWnew; // 前回レベルと今回レベルでエッジ
413 SWkeep = SWnew; // 今回レベルを保存
414 SWlevel = SWkeep; // 今回レベル
419~539行は実際のJoystick出力です。前回のアナログ入力と今回のインターバルでの入力が異なる時のみ、今回の値を出力します。
424 case 0:
425 if ( stick0R != potentiometer[index]) { // stick0R
426 Joystick.setXAxis( stick0R );
427 potentiometer[index] = stick0R;
428 }
429 break;
560~656行は、スイッチ(Button)の出力です。HATmodeの値によってcallする関数が違います。sw0R,sw1R,sw0L,sw1Lは、任意のボタンに変更しています。cfs2の時が一番解りやすいと思います。例えば569行は、スイッチ入力のエッジを検出した時にButton17をONかOFFにします。エッジ検出の時に'1'であればONとして'1'を出力します。'0'であればOFFとして'0'を出力します。SWedge,SWlevelはcase文の評価終了毎に右に1bitシフトします。
565 case 0: // sw0R HATうしろ
566 if( HATmode == 0 ) { // cfs1の時
567 SingleEncode( 16, 12, &sw0RTime, 10);
568 } else { // cfs2の時
569 if ( SWedge & 0x0001 ) Joystick.setButton( 16, (SWlevel & 0x0001) ); // Button17
570 }
571 break;
581 case 2: // sw2R HAT右回り チェック
582 if ( potm0R < 0x20 ) { // gameにボタン番号割当て時
583 CWturn( SideTurn, &RightIndex, 8);
584 } else { // 通常
585 RotaryEncode( RightTable, &RightIndex, &RightIndexold, &RightTime, (potm0R >> 5), 5);
586 }
587 break;
646 default:
647 if ( SWedge & 0x0001 ) { // edgeで
648 Joystick.setButton( index, (SWlevel & 0x0001) ); // 上記以外素直にSW出力
649 }
650 break;
函数 SingleEncode
スイッチに任意のボタン番号を設定します。ONの時と、OFFの時で違う番号でも構いません。また、スイッチがダブって同じボタン番号を割当てることも可能です。いちいちプログラムの埋め込み定数を変えなければなりませんが、USBコネクタを差したままコンパイルして書き込み出来るので、ひどく不便という事は無いでしょう。
672 void SingleEncode( int ondir, int offdir, int *time, int tmax )
函数 RotaryEncode
モーメンタリースイッチがONの間、首を右回り、あるいは左回りで真後ろまで首を振ります。OFFにすれば反対に正面を向きます。cfs1とcfs2でスイッチの解釈が違っていました。cfs1では古いButtonをOFFにしてから新たなButtonをONにします。cfs2では古いButtonはONのまま新たなButtonをONにします。
702 RotaryEncode( int *table, int *index, int *indexold, int *time, int tmax, int num )
函数 CWturn/CCWturn
ボタン番号をゲームの設定で割り振るために追加した函数です。Sirial1を宣言していますので、必要無くなりましたがシリアル出力をここに残しています。
771 void CWturn( int *table, int *index, int num )
右回りがあれば左は必要はないと思います。
v789 void CCWturn( int *table, int *index, int num )
他はシリアル出力に関するものなので説明は省略します。Cのライブラリにあるような函数ですが、自作しています。