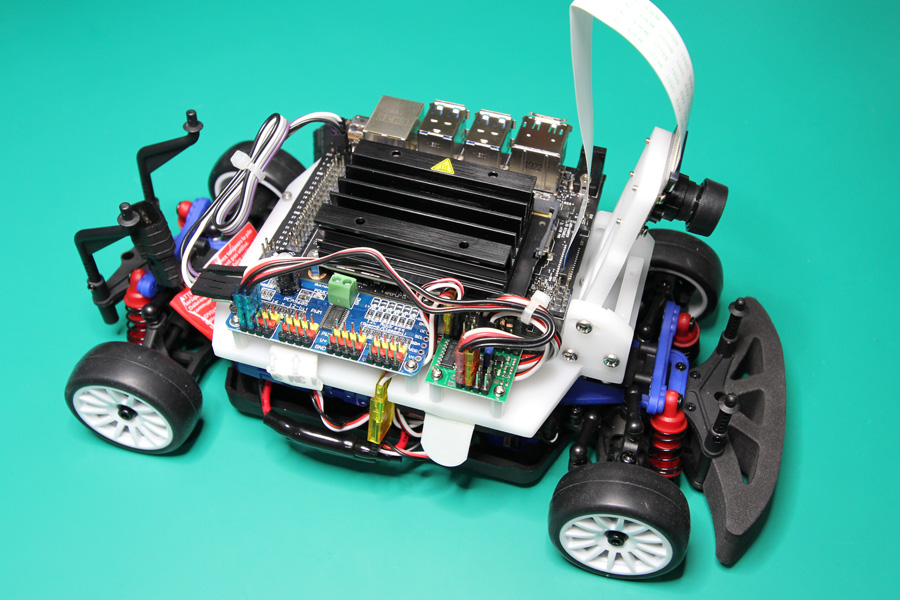
JetRacerの制作依頼が来ました。JetRacerをネットで調べると、NVIDIAのJetson_nanoを搭載し、AIにより自律走行するラジコンカーのようです。同社の提唱する Jetson用のプラットフォームらしいです。
NVIDIAのGitHubに詳しく掲載されていました。
JetRacerのハードル
JetRacerを始めようと思ってネットを調べても、以下のハードルにつまづいて
いる人が多いのではないでしょうか。
- 全て込みのキットにするか、素材を集めて作成するのか。
- シャーシは何を選べは良いのか、ラジコンは初めて。
- Jetson nanoが乗るベース板の入手難。stlファイルの公開のみ。
- そもそもJetson以外のハードのイメージが浮かばない。必要な物が不明。
これらを解決しないことには、スタート台に立てません。
私は本来電子回路設計者ですが、ラジコンカーの経験があり、CNC加工をしていますのでJetRacerの組立てに向いているのかも知れません。
そこで、今回の制作を通して、JetRacerでAIの学習を始めるために、次のようにアプローチしてハード環境を整えたらいいのではないかと、思いました。
キットの構成
まず、予算があれば完全キットで良いが、多少でもラジコンやPCの組立てとかやった事があれば、個別に部品を集めた方がお得と思います。ハードの結線はそんなに難しくありませんし、GitHubに写真付きで詳しく解説してあります。
シャーシの選択
次にChassis(ラジコンのシャーシ)の選択ですが、GitHubによると、
- Latrax Rally 1/18
- Tamiya TT02 1/10
2種類があります。今回はLatrax版によるJetRacerの作成依頼で選択の余地はありません。ただし、baseボードとカメラホルダー(camマウント)は入手していない、とのことでした。
今回はlatraxですが、私は日本ではやはり国内企業の、TAMIYA(タミヤ)が選び安いと思います。また、同じTT-02でもベアリングが多いTYPE-Sやバギータイプ、ドリフト車タイプ等多くバリエーションがあります。街の模型屋さんでも扱っていますし、補修部品も入手しやすいと思います。
走行場所の関係で1/18スケールのLatraxを選択した方が良いのでは、と思われる方も多いと思われますが、実はそんなに大きさの違いは感じません。 なのでLatraxでもTamiyaでもどちらでも構いません。 であれば、TAMIYAが良いのではないかと思います。
ただし、ひとつ注意すべきは、プロポ(ラジコンの送受信機)は3ch(3チャネル)の物を選んでください。1ch目はステアリングのサーボ、2ch目はESC(エレクトリック・スピード・コントローラ)によるモータ制御、そして3ch目はAI学習の時にRC(ラジコン)側の操縦に切り替える為のスイッチとして使用します。タミヤには2chと3chの送信機があり、併売しています。
タミヤに関しては別記事で紹介予定です。
以前KyoshoのMINI-Z(ミニッツ)で遊んだことがあります。スケール1/27でグッとコンパクトで、日本の住宅事情では理想的と思います。しかし、これにはJetson_nano等のシステムが乗りません。以前はRaspberry-piで考えましたが、Batteryやその他の基板の面積で難しかったです。
ベースボードの話し
JetRacerは、GitHubを参照して、要素部品を単品で購入して組み立てる事もできます。 その際にひっかかるのがベースボードとカメラホルダーの入手です。GitHubによるとこれらは3Dプリンターによる出力素材になっていて、 キット以外ではstlファイルから制作するようになっています。自分で3Dプリントするか、外注するかですね。
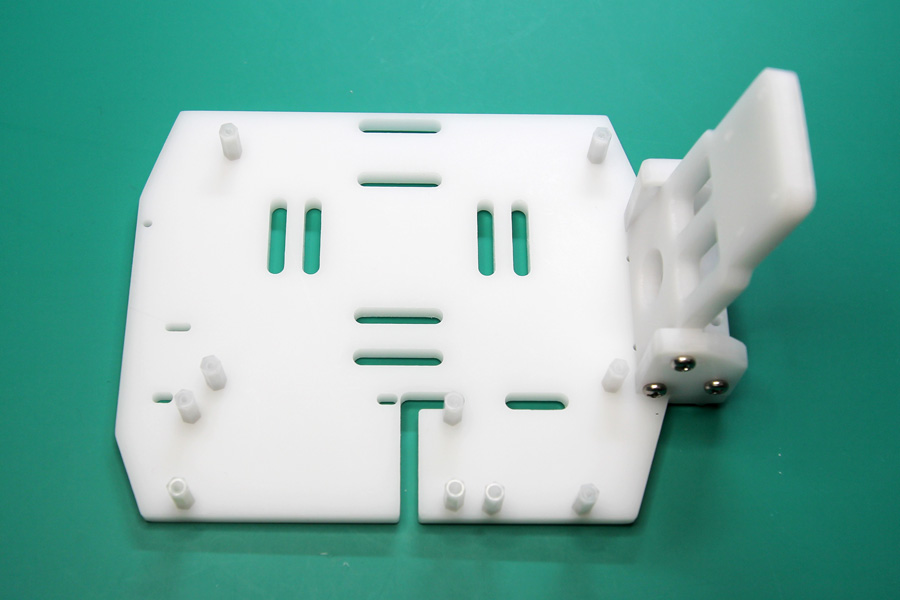
上の写真はPOM材によるCNC加工で制作したベース板です。stlファイルをFusion360で見たところ、CNC加工による切削で出来そうに見えました。そこでstlファイルから採寸し、2Dデータを作成しました。ただし、現物合わせで寸法を若干変えています。
また、カメラホルダーは設計変更して、角度を0~20°まで可変できるようにしました。
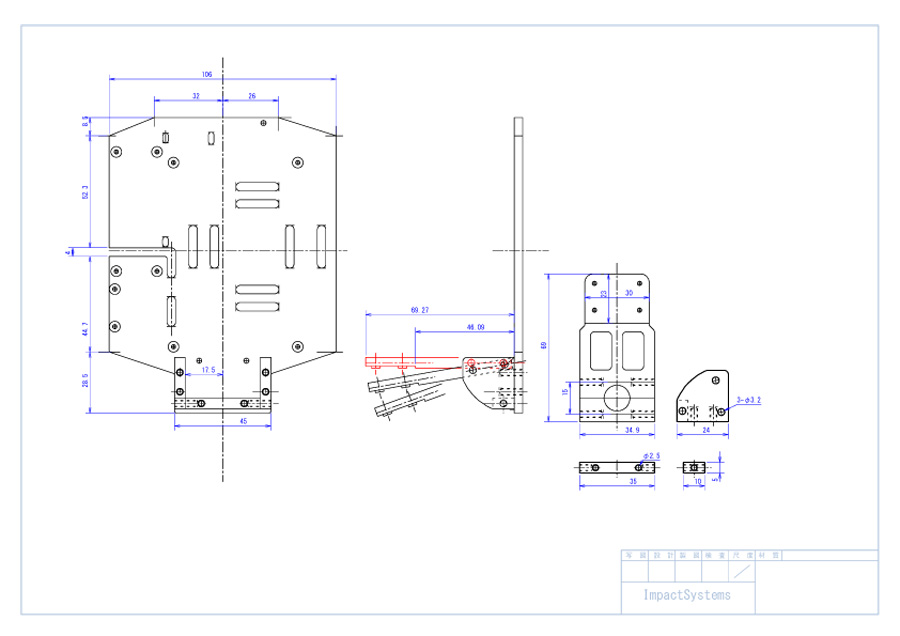
これはPOM材による加工図です。左側は平板による図面です。その右側は側面で、カメラマウントの傾きの様子を示しています。stlファイルでは10度程度の傾きでしたが、20度までは傾けられるようにしました。カメラマウントは4ピースで構成しています。画像では見にくいですので、PDFファイルはここをクリックしてしてください。
必要な物
GitHubを参照して構成部品をリストアップしました。購入リンク等詳しくはGitHubを参照してください。カメラマウント(カメラホルダー)は異なるのでネジが追加になっています。
Jetson Nano 周辺
- Jetson Nano NVIDIA 本体
- Micro SD Card 各社1 32GB以上(推奨は64GB?)
- USB Mobile Battery 各社 5V/2A出力(自律走行時使用)
- USB A to 2.1ΦDCジャック 変換ケーブル 各社 (バッテリーから本体へ)
- 5V/4A 電源(ACアダプタ,2.1Φ) 各社 (プログラミング時の使う)
- Battery充電ケーブル Mobileバッテリーに付属?
- Battery充電用ACアダプタ Mobileバッテリーに付属?あるいは流用
- Battery固定用両面テープ
Chassis関係
- RC Car latrax
- base board POM材をCNC切削 100x150xt5
- camera mount POM材をCNC切削 端材で4枚作成
- M2x8 SUS六角穴ネジ x10
- M2x30 SUS六角穴ネジ x2
- M2x40 SUS六角穴ネジ x2
- M3x10 SUSなべ小ねじ x6
- M3x8 SUSなべ小ねじ x6
- M3x20 Standoff x4 メス-メス、手持ち品より
- M2x10 Standoff x6 オス-メス、手持ち品より
電装品
- PWM Servo Motor Driver
- RC Servo Multiplexer
- 4芯サーボハーネス x1
- 3芯サーボハーネス x5
Wi-Fi
- Wi-Fi Card
- Wi-Fi Antennas
Camera
- Leopard Imaging
動画紹介
組立ての様子を動画にしました。


コメント